Schon bei den ersten Gedanken zu KITTs technischer Umsetzung stand für mich eine Sache fest: er sollte nicht nur wie KITT aussehen, er sollte auch in seinem “Verhalten” die Illusion des sympathischen, denkenden Knight 2000 erzeugen.
Elementarer Teil hierbei ist, dass die unzähligen Knöpfe und Tasten auch tatsächlich irgendetwas “Sinnvolles” machen, wenn man darauf rumdrückt. Ein langweiliges Piepen wie beim Drücken auf der Telefontastatur war mir da schlicht zu wenig!
Aber für ein so außergewöhnliches Hobby gibt es nicht alles einfach so von der Stange. Deshalb beschäftigte ich mich in meiner Freizeit über die Jahre mit Themen wie Programmierung, Elektronik, 3D-Design und 3D-Druck, um meine Vorstellungen selbst in die Tat umsetzen zu können.
KITT Talk
Auch Sprache und Spracherkennung waren für mich wesentliche Themen, so dass ich bereits vor über vierzehn Jahren eine Software namens “KITT Talk” programmierte, die in ein Mikrofon gesprochene Sätze auf Schlüsselworte analysieren und dann eine Sounddatei abspielen konnte, die diesen Schlüsselworten zugeordnet war.
Heute ist Spracherkennung dank Alexa, Siri und Google allgegenwärtig und völlig selbstverständlich geworden, aber 2007 sah das noch ganz anders aus- wohlgemerkt: fünf Jahre vor der Veröffentlichung von Siri!
Der technische Aufwand war ebenfalls deutlich größer: man benötigte einen, für damalige Verhältnisse, leistungsstarken Windows-Computer, ein Mikrofon und eine spezielle Spracherkennungssoftware, die man erst auf seine Stimme trainieren musste.
KITT Talk selbst stellte ich kostenlos auf meiner Internetseite zum Download bereit und so konnte ich bereits nach kurzer Zeit Downloads aus der ganzen Welt verzeichnen.

Letztendlich fand KITT Talk nie den Weg in mein Fahrzeug – dies war auch gar nicht beabsichtigt. Für mich war KITT Talk Grundlagenforschung für zukünftige Entwicklungen und ein praktisches Projekt, um das Programmieren zu erlernen.
KITT Talk V2 war dann als Standalone-System angelegt mit verschiedenen Modulen wie Mediaplayer, Wikipedia-Anbindung und Skype-Telefonie und technisch deutlich ausgereifter. Leider wurde KITT Talk V2 letztlich vor der Fertigstellung von der Entwicklung überholt und blieb unvollendet. Leider, wie ich inzwischen sagen muss, denn das Herumspielen mit den fertiggestellten Module machten schon sehr viel Spaß.



Dash System
Um KITT mit digitalem Leben zu füllen, gibt es verschiedene Möglichkeiten. Man kann zB einen Windows-PC im Fahrzeug einbauen und entsprechende Software darauf installieren. Alternativ gibt es auch einfache Mediaplayer, die per Tastendruck Videos auf den Monitoren anzeigen.
Beide Varianten entsprachen jedoch überhaupt nicht meinen Vorstellungen:
die Windowsvariante war zwar umfangreich konfigurierbar, technisch jedoch wartungsintensiv, umständlich in der Nutzung und äußerst störungsanfällig. Der Mediaplayer war betriebssicher, aber äußerst beschränkt in seinen Möglichkeiten.
Also musste wieder was Selbstgebautes her!
Folgende Erwartungen hatte ich von an das System:
- unabhängige Ansteuerung beider Monitore
- Abfrage aller Tasten der Switchpods (Tastenpulte hinter dem Lenkrad)
- Einbindung weiterer Komponenten über Datenbus
- Funkfernbedienung für Direktfunktionen
- Direkte Ansteuerung von Relais für Schaltaufgaben
- Updatefähig
- möglichst kompakte Abmessungen
- einfache Stromversorgung
- kurze Ladezeiten beim Booten
- geringer Stromverbrauch
Für die Wiedergabe der Videos fiel meine Wahl auf den Einplatinencomputer Raspberry Pi3+, pro Monitor einen.
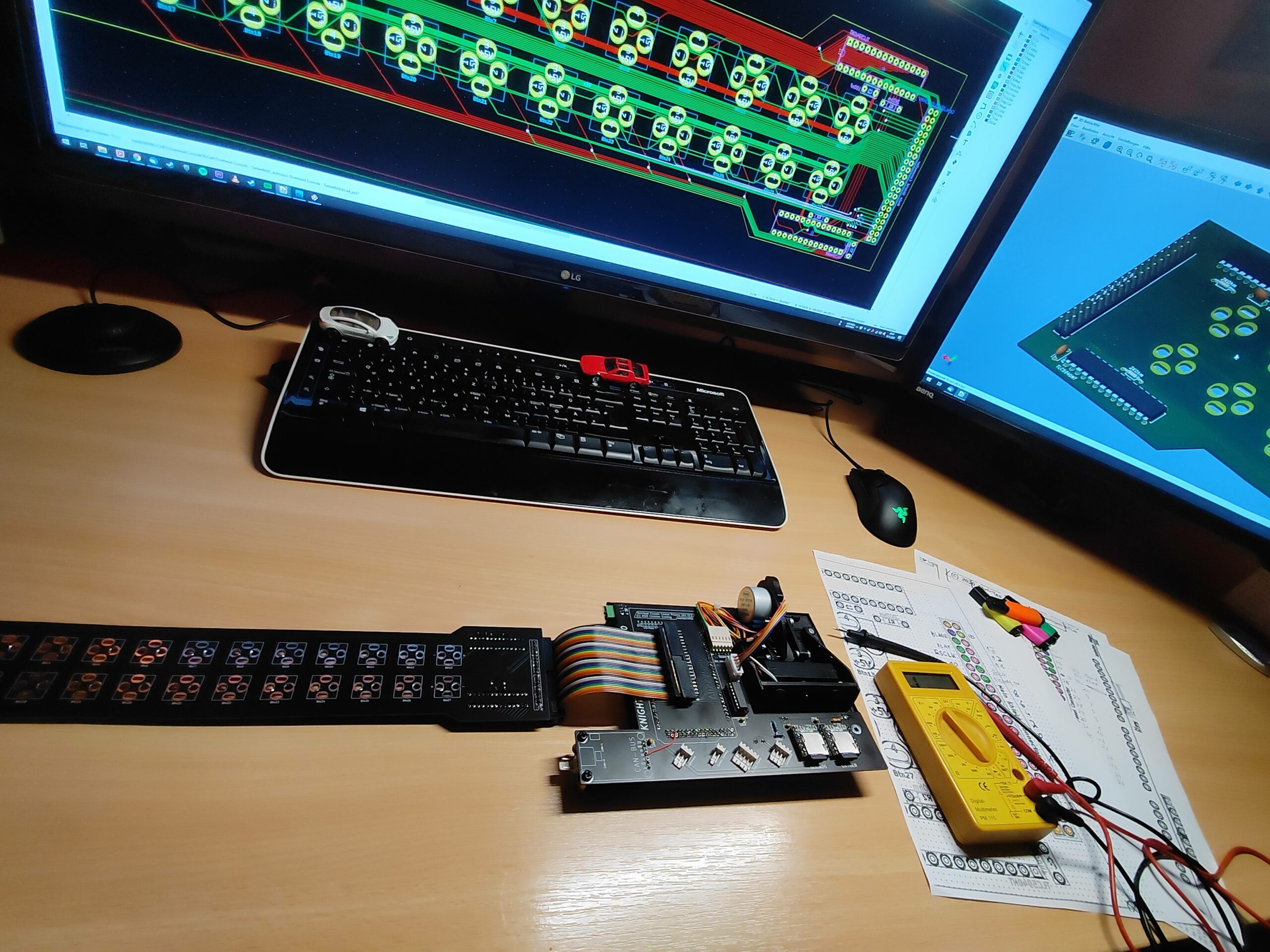
Für die Signalverarbeitung kommt ein Arduino-Mikrocontroller zum Einsatz, der Tastendrücke von Switchpods, und Fernbedienung empfängt, aber auch Befehle über CAN-Bus von externen Komponenten (Overhead Console, Scanner,…) empfangen kann.
Weitergeleitet werden diese Eingänge an die Raspberry Pi+, die dann bei entsprechendem Befehl die hinterlegten Videodateien anzeigen.
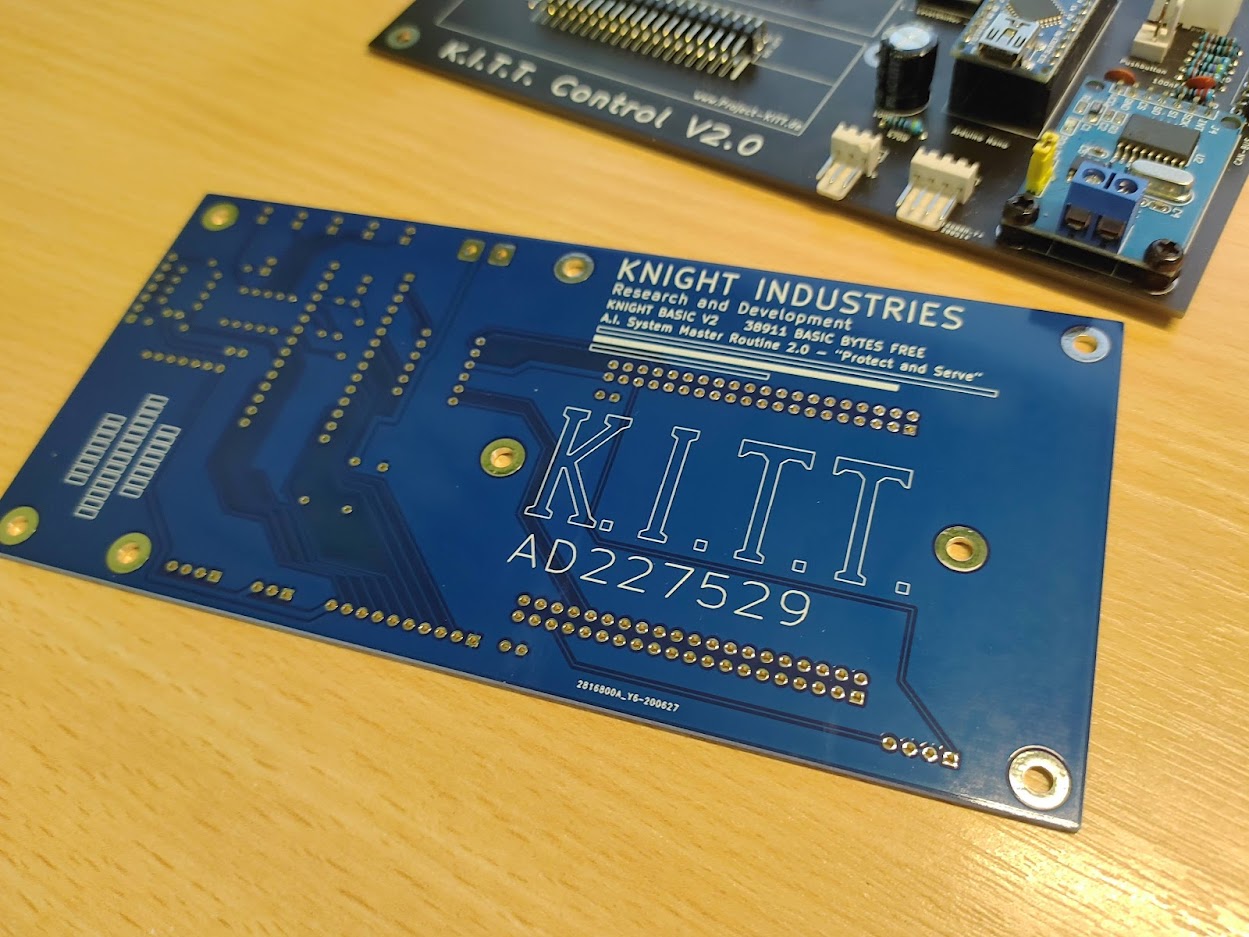
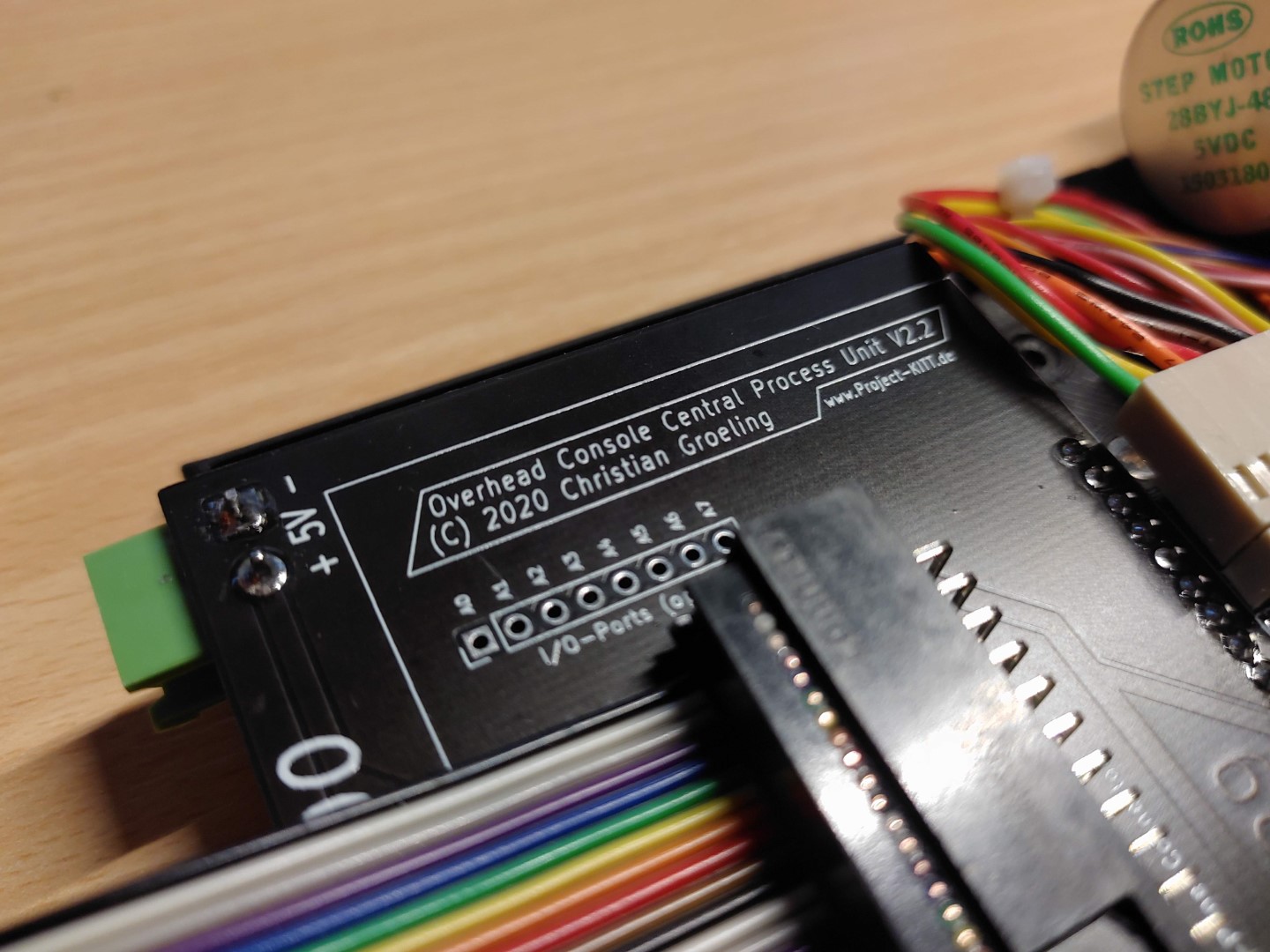
Am Computer entwarf ich eine Hauptplatine, auf der ich in Sandwichbauweise die einzelnen Komponenten montiere. Dies erleichtert den Austausch im Fall eines Defektes. Diese Platine ließ ich dann bei einem Leiterplattenservice anfertigen. Bei der Gestaltung des Platinendesigns blieb ich dann selbstverständlich im Stil des Knight 2000 und auch für eine kleine Hommage an meinen Lieblingscomputer der 80er, den Commodore 64, blieb noch etwas Platz.

Das System steht in der Signalverarbeitung etwa zwei Sekunden nach dem Einschalten zur Verfügung. Lediglich die Raspberry Pi benötigen etwa 15 Sekunden zum Laden des Betriebssystems, danach sind auch die Videoplayer bereit für die Show.
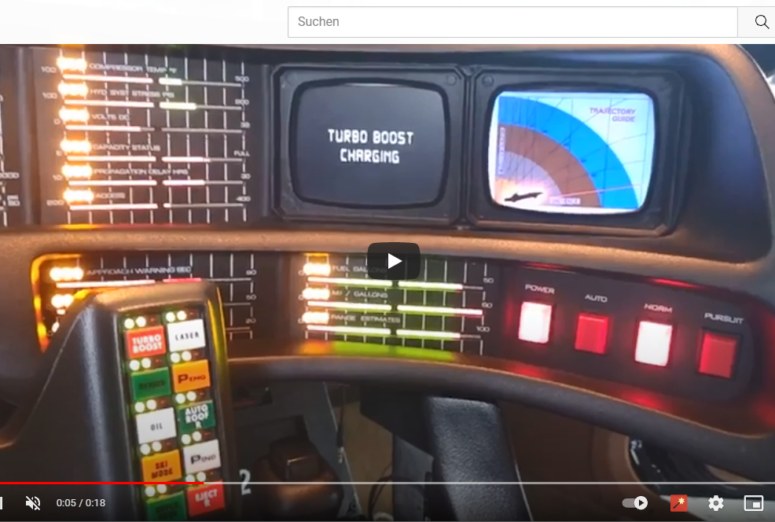
Mittels Adobe Premiere habe ich dann Animationen erstellt, die bei Druck auf die jeweilige Taste (Turbo Boost, Oxygen, Record,…..) abgespielt werden – für jeden Monitor ein eigenes Video. Manche Tasten habe ich allerdings auch mit Sprachzitaten versehen

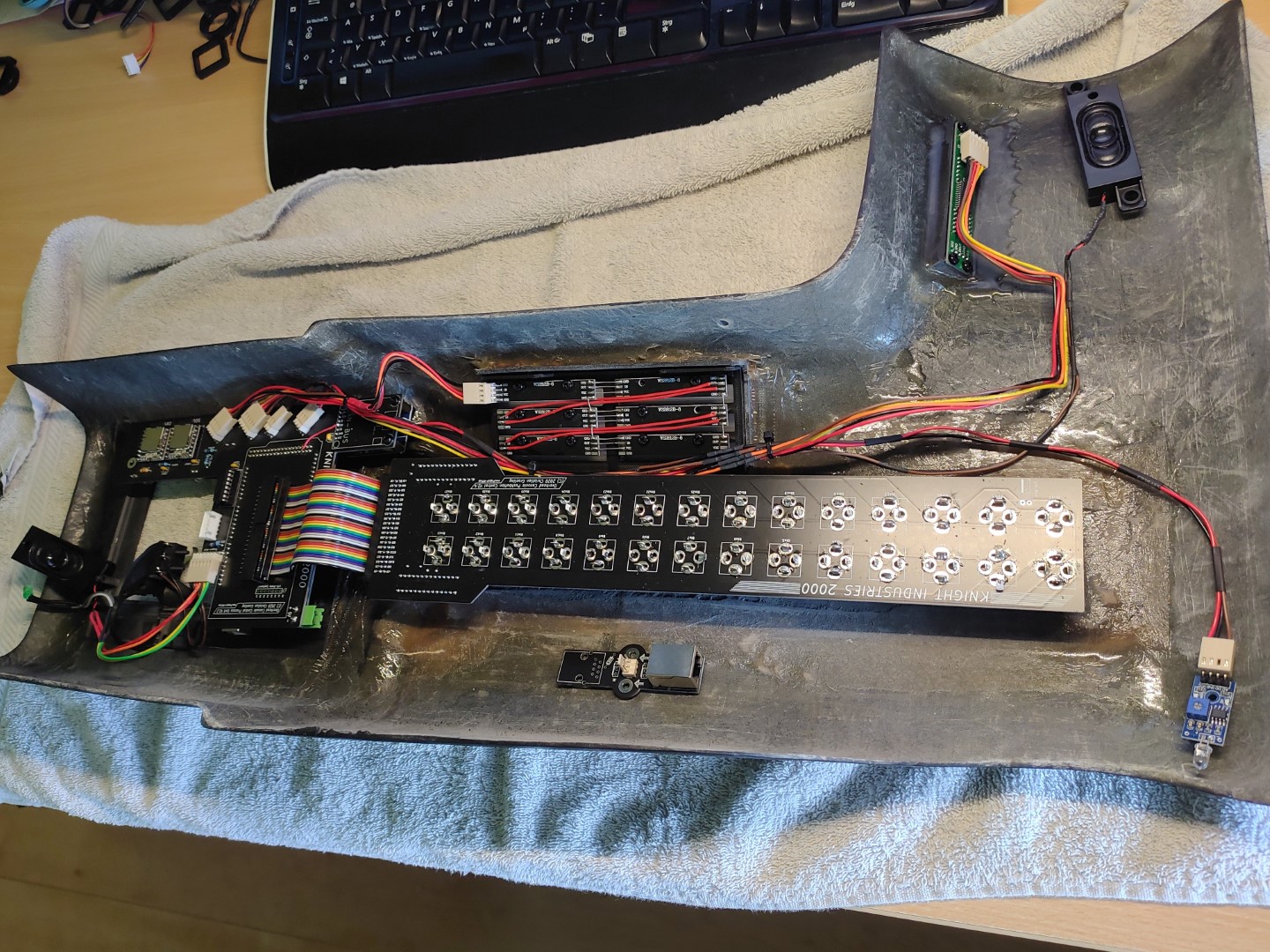
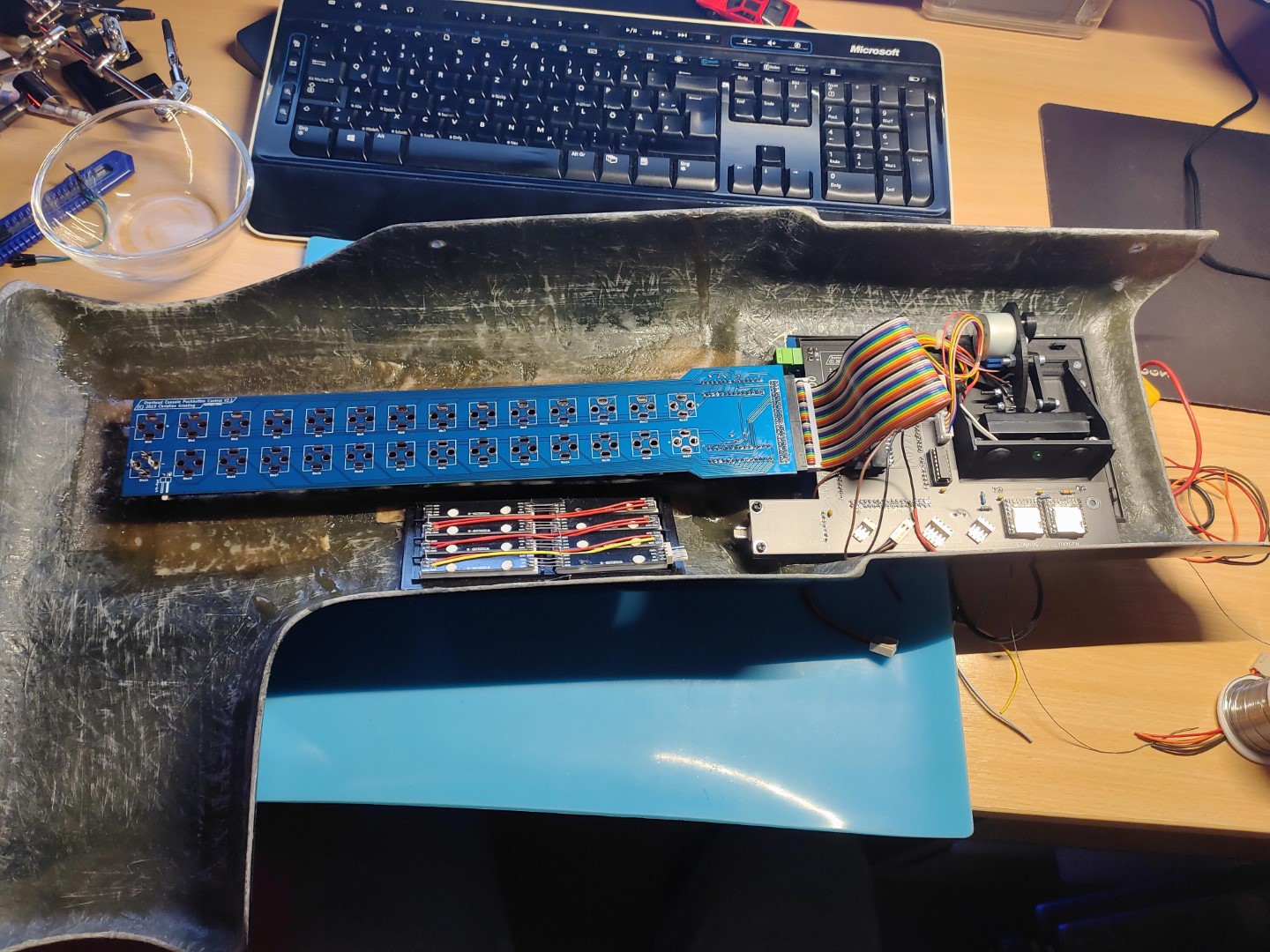
Overhead Console
Vor eine weitere Herausforderung stellte mich die Gestaltung von KITTs Dachkonsole – oder auch Overhead Console. Auch hier wollte ich mich nicht mit einer reinen Dummy-Konsole zufrieden geben, die bloß leuchtet und sinnlos piept. Zusätzlich bin ich großer Fan der “Sauerstoff-Funktion” aus der Folge “Sammy’s Sensationsshow” und wollte diese unbedingt in der Konsole unterbringen.
Aber was kann meine Konsole jetzt?
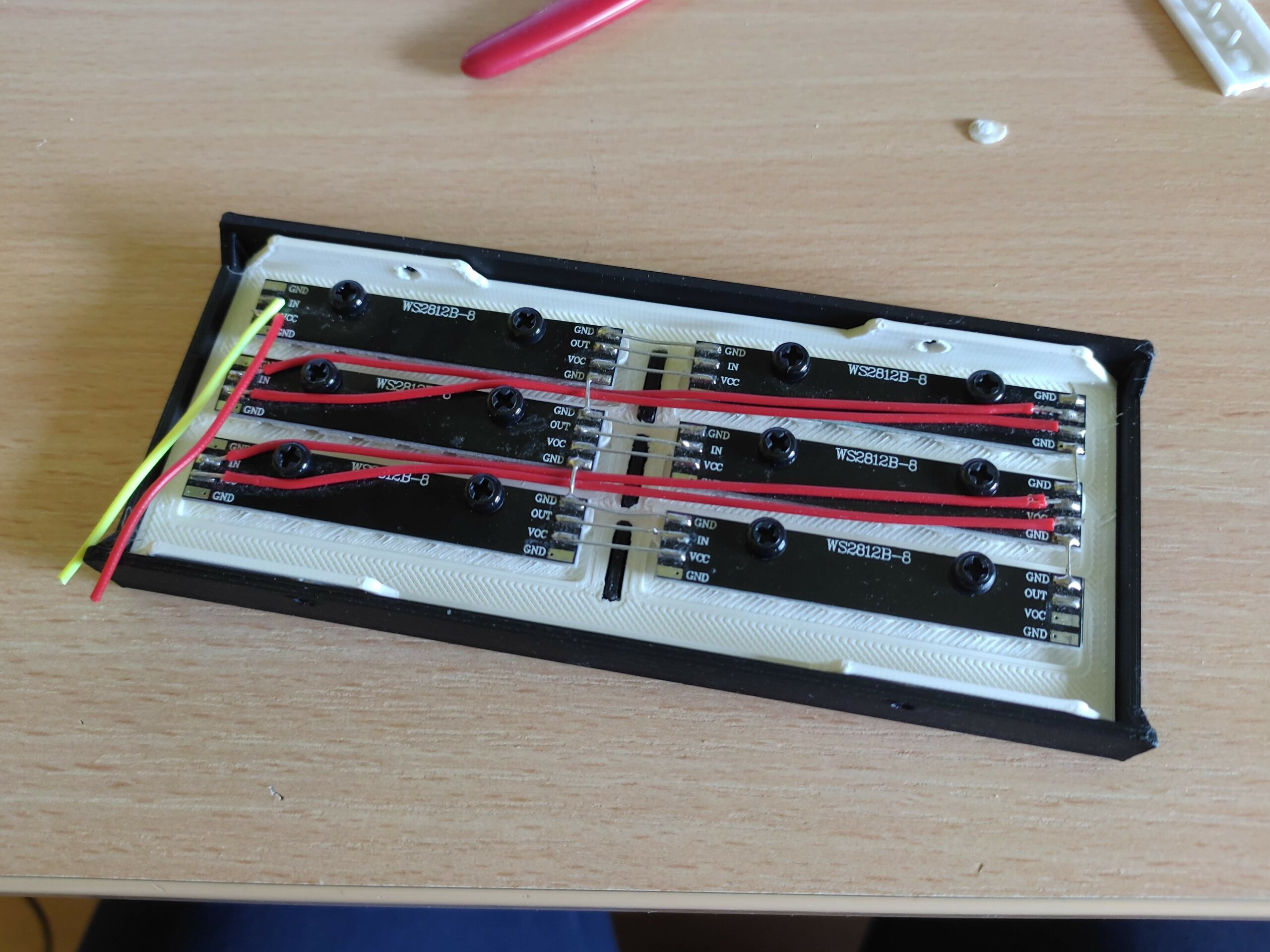
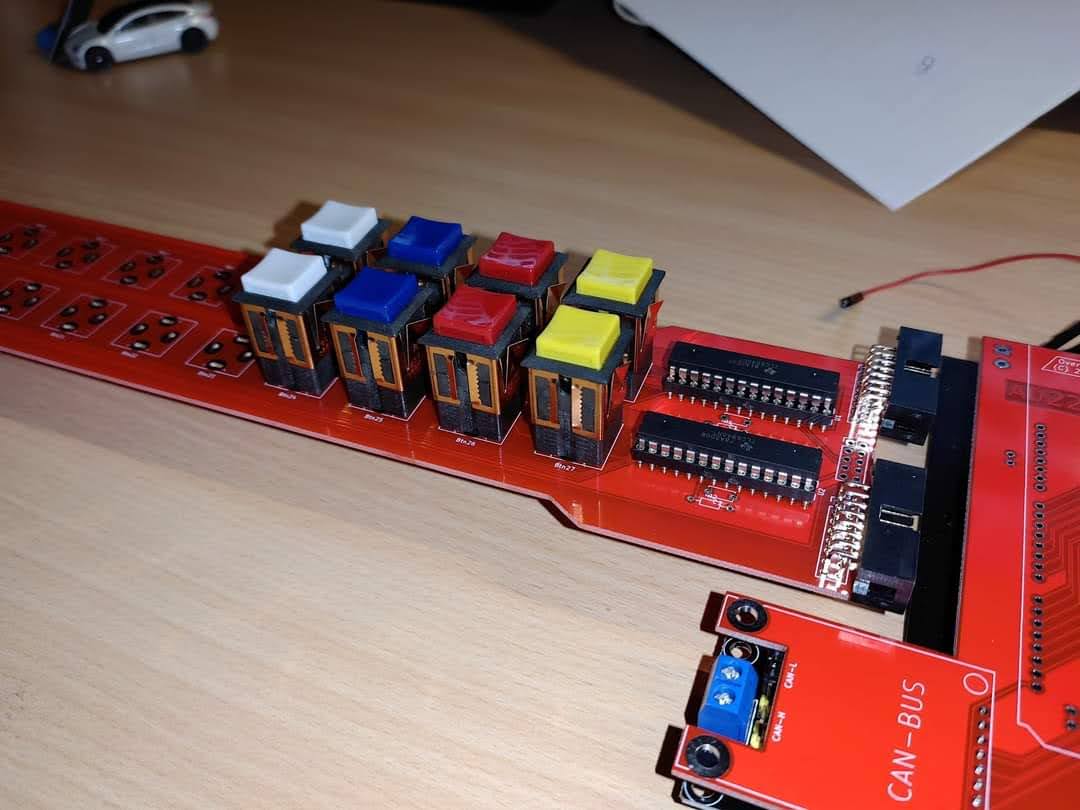
- 28 Taster, die in verschiedenen Animationssequenzen aufleuchten können
- Telefontöne bei Tastendruck
- Verschiedene Lichtprofile, z.B. automatisches Abdimmen bei Nacht
- Ausfahrbare Oxygen Unit mit Soundwiedergabe
- CAN-Bus zur Kommunikation mit dem Dash-System
- 8fach Numerikdisplay für Systemmeldungen
- 6fach Statusdisplay rot/grün für die wichtigsten Funktionen

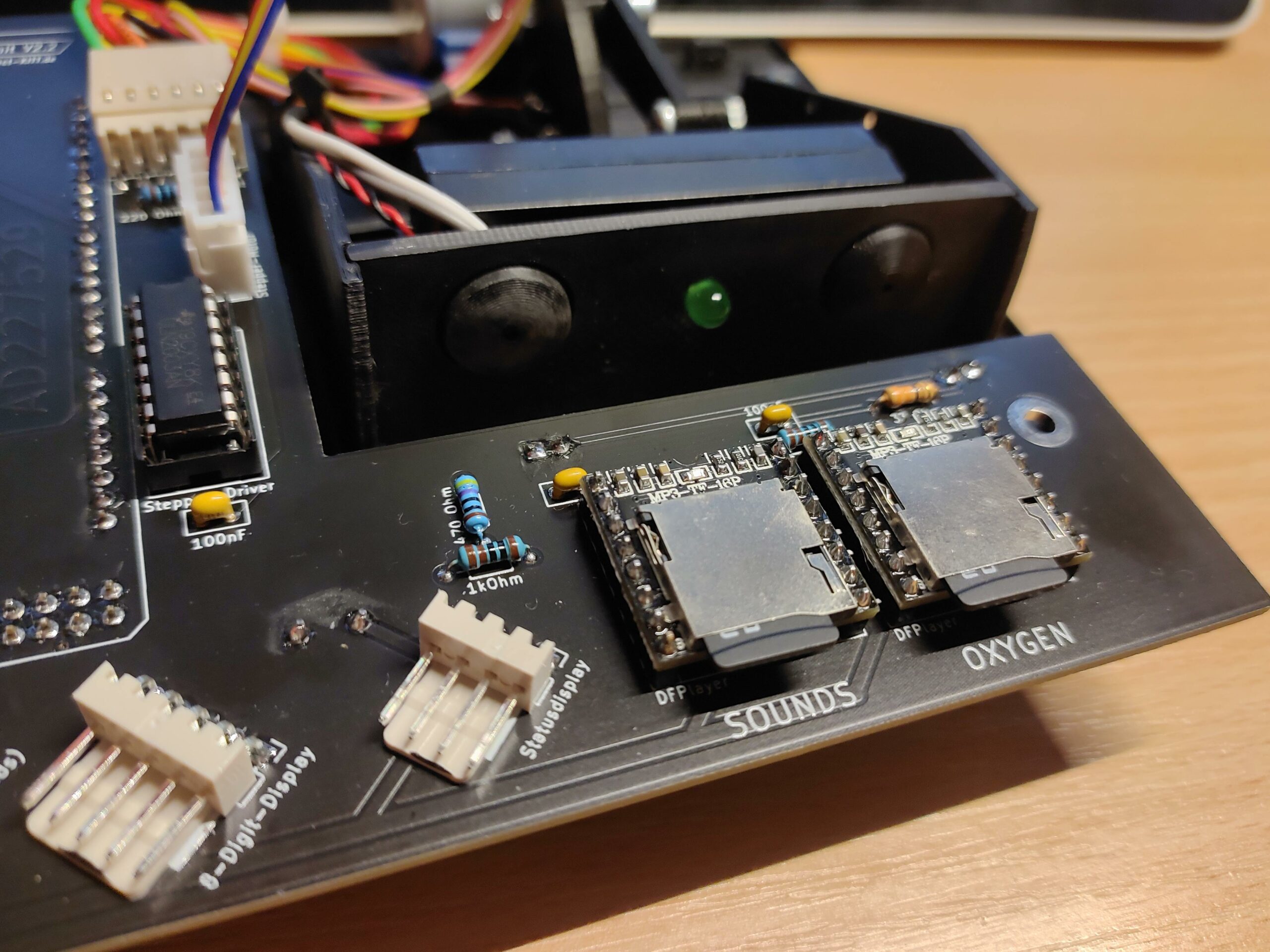


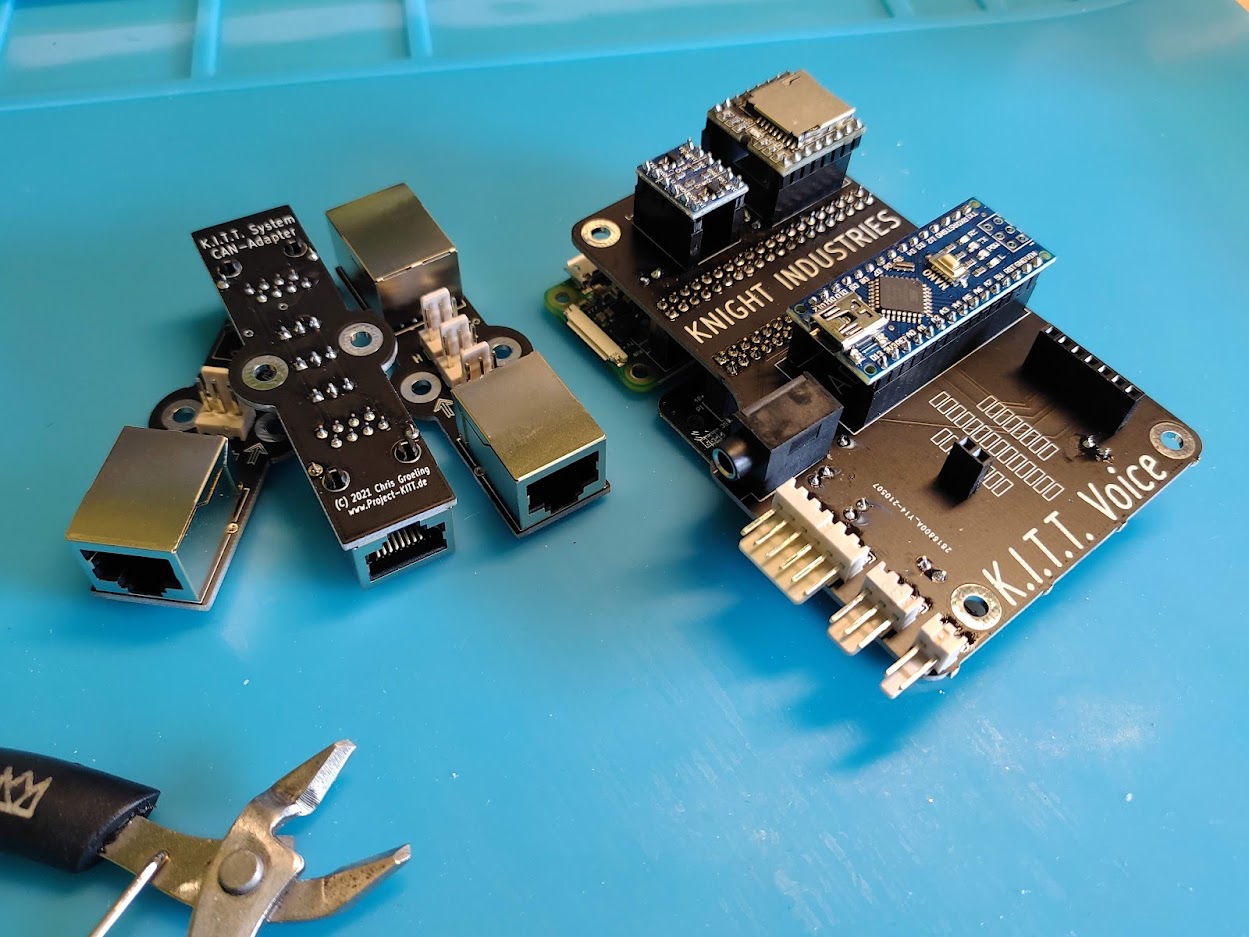
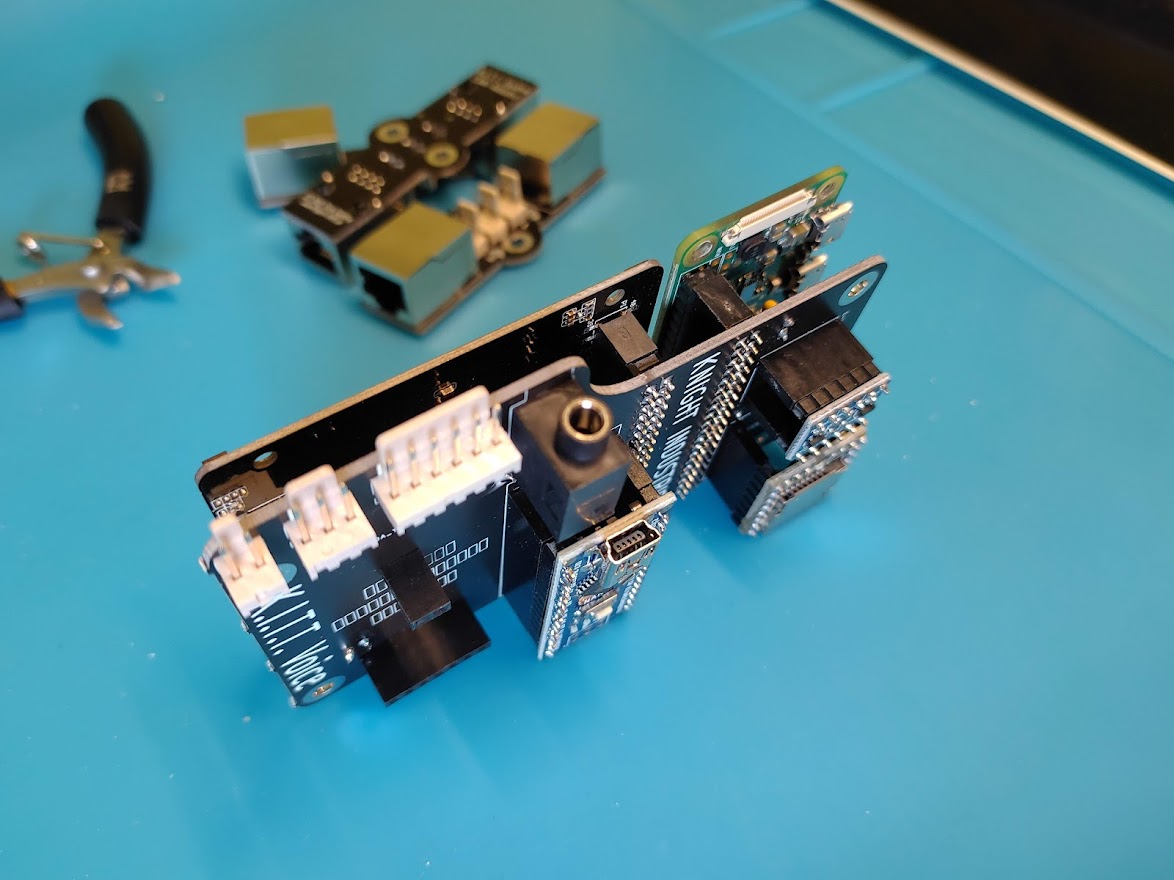
KITT Voice Modul
Damit KITT sprechen kann, habe ich ein Zusatzmodul entworfen, das über CAN-Bus mit den anderen Komponenten kommunizieren kann. Empfängt das Modul einen passenden Befehl, wird von der eingelegten Speicherkarte das zugehörige MP3-File abgespielt. Für ein späteres Update sind Richtmikrofon und Raspberry Pi Zero installiert. Damit kann das Modul dann auch gesprochene Sätze auswerten und somit auf Sprachkommandos reagieren.
Scanner Controller
Auffälligstes äußeres Merkmal von KITT ist das rote Lauflicht in der Front, der sogenannte Scanner. Acht 50 Watt Halogenbirnen sorgen für ausreichend Lichtleistung auch bei strahlendem Sonnenschein. In meinem KITT werkelte von Anfang an ein Lauflicht von Lectric Enterprises, vor 15 Jahren das Beste, was überhaupt erhältlich war. Aber irgendwann geht auch das zuverlässigste Gerät mal kaputt.
Und wo ich gerade einmal so schön dabei war, meine eigene Elektronik zu basteln, machte ich direkt mit dem Steuergerät weiter, das ich mit ein paar neuen Funktionen technisch auf den neusten Stand bringen wollte. Die Aluminiumbar des alten Scanners verwendete ich einfach weiter.
Die Features:
- Halogenlampen mit 50 Watt
- Passiv gekühlt
- Mehrere Lauflichtprogramme
- Bedienpult im Design von KITTs Surveillance Mode-Modul
- Ansteuerung über CAN-Bus
- Tonausgabe mit typischem Scannersound
- zweites Soundmodul mit Turbinengeräusch
- komplettes Design im Stil von KITTs Hauptprozessor (u.a. zu sehen in der Folge “KITT sitzt in der Falle”)
















Hinweis:
Sämtliche hier gezeigte Elektronik habe ich aus persönlichem Antrieb als Hobbyprojekt ausschließlich für meinen KITT entwickelt. Sie kann weder komplett, noch in Teilen käuflich erworben werden!
Anfragen bzgl. des Teilens von Quellcode meiner Software werden nicht beantwortet!